Surgical Robotics, A curated analysis
Enjoy navigating a free and resourceful website on surgical robots. Interactive, rich, dynamic entry-point to all useful information, this platform lets you review and search complete data sheets about surgical robots: description, specialties of use, characteristics, analytical data, feedback from surgeons. Every robot listed on this platform is marketed, CE marked and/or FDA approved. This […]
High Torque, Compact Actuation to Power the Next Generation of Humanoid Robots
High Torque, Compact Actuation to Power the Next Generation of Humanoid Robots Link to original news: https://sonceboz.com/high-torque-compact-actuation-to-power-the-next-generation-of-humanoid-robots/ As humanoid robots transition from lab concepts to real-world applications — in logistics, manufacturing, and even home environments — the need for actuators that combine power, control, and compactness is becoming essential. Sonceboz’s Rotative Actuator rises to this […]
Advancing Mobile Robotics: ARM Laboratory’s robots designed for Inspections and Maintenance operations in Harsh Environments

In the demanding world of industrial maintenance, human operators routinely confront hazardous conditions while performing dangerous tasks in confined, elevated, or degraded environments. The maintenance industry requires systems that can reliably operate in such harsh contexts, executing complex operations like detailed inspections, surface treatments, and repairs while preserving human health. The Automation, Robotics, and Machines […]
Robo-Gym. Smart Interface to Accelerate the Human-Robot Teamwork
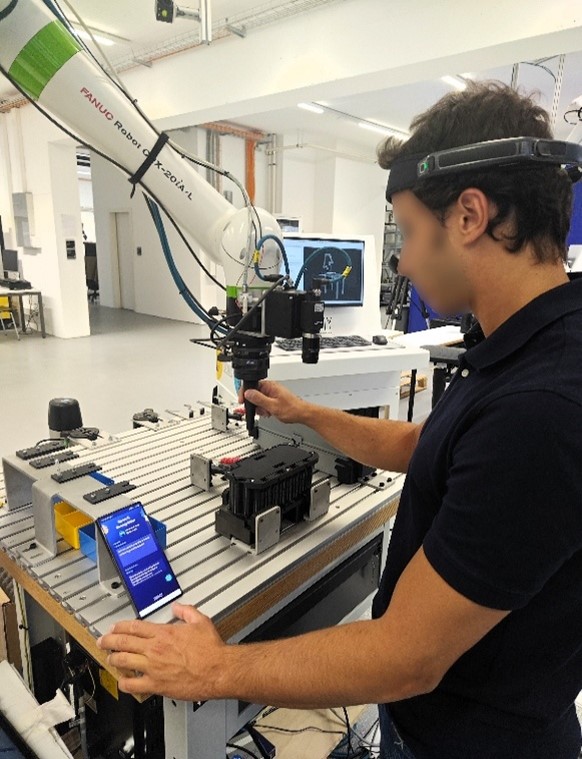
In many industrial domains, full automation remains either technically infeasible, economically impractical, or too rigid to accommodate the diversity of real-world tasks and objects. In such contexts, cobots provide an attractive alternative, enabling flexible human–robot collaboration in which human adaptability and dexterity complement robotic precision and endurance. The Robo-Gym at SUPSI, developed and coordinated by […]