Robotics meets creativity: Helbling’s scribble robot writes Christmas cards

This holiday season, Helbling demonstrated that innovation can come from everyday needs. The team taught their Scribble robot to write traditional Christmas cards in a way that saves time and is easy on the wrist—combining robotics with a personal touch. The project showcases how robotics can support practical tasks while inspiring creative solutions. It’s a […]
P8S. Next warehousing. Now.

Pick8ship Technology AG launched its new brand at Swiss Robotics Day 2025, opening a new chapter:P8S. Next warehousing. Now. The new brand identity clearly reflects what drives the company and where it is headed: the next generation of warehousing — more mobile, faster, and more sustainable. Products, the website, design, and overall communication have been […]
New implant restores pressure balance after spinal cord injury

A groundbreaking new implant is giving people with spinal cord injuries a chance to regain control over their lives. Developed by EPFL’s Grégoire Courtine and UNIL/CHUV’s Jocelyne Bloch, the system stabilizes blood pressure—a hidden but critical challenge for most SCI patients—through precise neurostimulation of the spinal cord. Participants like Julie and Daniel report renewed energy, […]
Surgical Robotics, A curated analysis
Enjoy navigating a free and resourceful website on surgical robots. Interactive, rich, dynamic entry-point to all useful information, this platform lets you review and search complete data sheets about surgical robots: description, specialties of use, characteristics, analytical data, feedback from surgeons. Every robot listed on this platform is marketed, CE marked and/or FDA approved. This […]
Advancing Mobile Robotics: ARM Laboratory’s robots designed for Inspections and Maintenance operations in Harsh Environments

In the demanding world of industrial maintenance, human operators routinely confront hazardous conditions while performing dangerous tasks in confined, elevated, or degraded environments. The maintenance industry requires systems that can reliably operate in such harsh contexts, executing complex operations like detailed inspections, surface treatments, and repairs while preserving human health. The Automation, Robotics, and Machines […]
Robo-Gym. Smart Interface to Accelerate the Human-Robot Teamwork
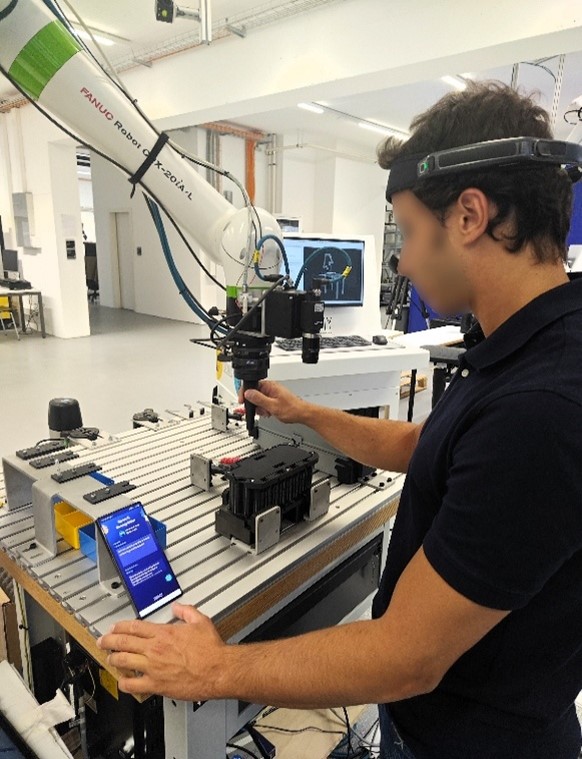
In many industrial domains, full automation remains either technically infeasible, economically impractical, or too rigid to accommodate the diversity of real-world tasks and objects. In such contexts, cobots provide an attractive alternative, enabling flexible human–robot collaboration in which human adaptability and dexterity complement robotic precision and endurance. The Robo-Gym at SUPSI, developed and coordinated by […]
Registration is now open for RobotX Innovation Day, taking place on July 4th

https://robotx.ethz.ch/
Rivr’s dog-like robots join Veho vans to solve ‘last-100-yards’ parcel delivery in Austin

Zurich-based robotics startup Rivr and U.S. delivery company Veho are piloting a stair-climbing delivery robot in Austin to tackle the “final 100 yards” of last-mile delivery — from van to doorstep. Starting with one supervised robot making daily runs, the trial aims to address a complex logistical challenge that’s simple for humans but tough for […]
European Robotics – a Unified Vision
euRobotics is pleased to announce the public launch of ‘A Unified Vision for European Robotics’, a new strategy for innovation, growth and societal impact. It sets out the collective vision of the European Robotics community and draws on multiple sources of information from within Europe and beyond.
EPFL launches shape-shifting robot GOAT: A breakthrough in adaptive terrain exploration.

Researchers from EPFL’s CREATE Lab, led by Josie Hughes, have developed GOAT (Good Over All Terrains) — a shape-shifting robot inspired by animals’ adaptability. GOAT can morph between a flat rover and a sphere, allowing it to drive, roll, and swim across various environments. This flexible design enables energy-efficient, versatile locomotion without limbs, setting a […]